相机模型与标定笔记
针孔模型的坐标系投影
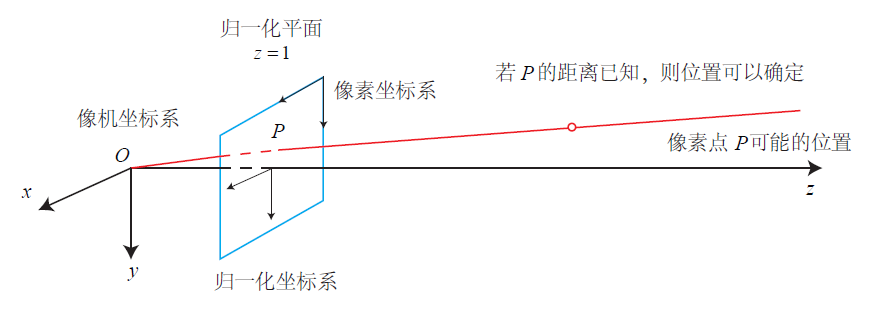
世界坐标系 -> 相机坐标系 -> 归一化平面 -> 像素坐标系
世界坐标系 -> 相机坐标系(外参)
\[ P_c=RP_w+t=\begin{bmatrix}R&t\\0&1\end{bmatrix}P_w=TP_w= \begin{bmatrix} X\\Y\\Z \end{bmatrix} \]
相机坐标系 -> 归一化平面
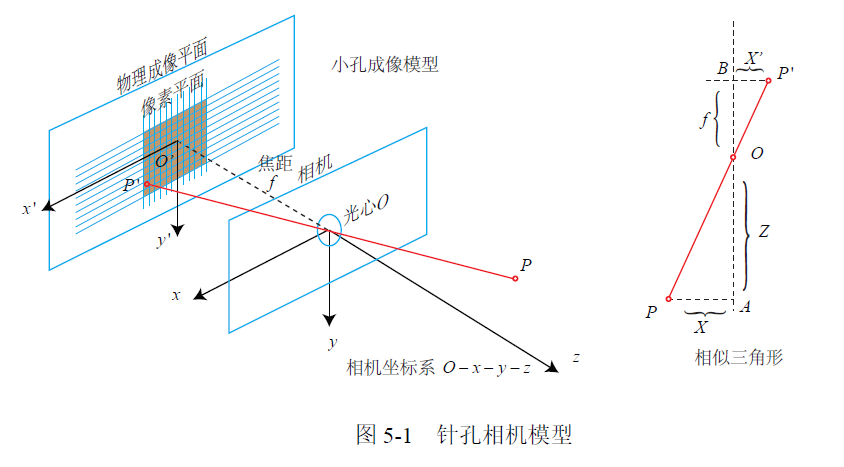
如上图所示,\(X'\) 为归一化平面坐标,\(X\) 为相机坐标系坐标,\(f\) 为焦距(通常单位是毫米 mm)。根据相似三角形: \[ \begin{aligned} \begin{cases} X'=f \frac XZ \\ Y'=f \frac YZ \end{cases} \end{aligned} \] 此时已将归一化平面翻转(非倒像),否则 \(X'\) 与 \(Y'\) 需取负。
归一化平面 -> 像素坐标系
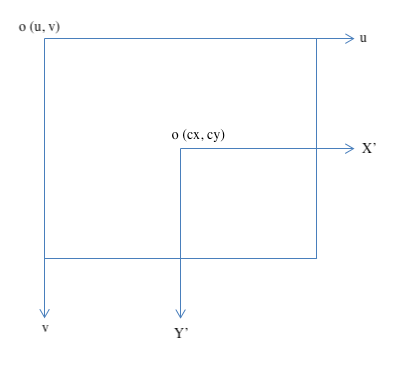
像素坐标系通常从图像左上角开始
设在 \(X'\) 方向:\(1\,pix=dx\,mm\) (毫米转像素);
在 \(Y'\) 方向:\(1\,pix=dy\,mm\)
则: \[ \begin{cases} u=\frac {1}{dx}X'+c_x\\ v=\frac {1}{dy}Y'+c_y \end{cases} \] 与前一步合并一下: \[ \begin{cases} u=f_x\frac XZ+c_x\\ v=f_y\frac YZ+c_y \end{cases} \] 转换成矩阵形式: \[ \begin {aligned} \underbrace {\begin {pmatrix} u\\v\\1 \end {pmatrix}}_\text {其次坐标} = \frac 1Z \begin {pmatrix} f_x&\gamma&c_x\\ 0&f_y&c_y\\ 0 &0&1 \end {pmatrix} \underbrace {\begin {pmatrix} X\\Y\\Z \end {pmatrix}}_\text {非其次坐标} =\frac 1ZKP \end {aligned} \] 其中: \[ \begin{cases} f_x=\frac f{dx}\\ f_y=\frac f{dy} \end{cases} \] \(\gamma\) 描述的是两个坐标轴的偏转。
\(K\) 称为内参矩阵
对于齐次坐标,尺度因子(这里指距离 Z)不会改变坐标值的;与光心位于同一直线的所有点在归一化平面上是同一个投影点。
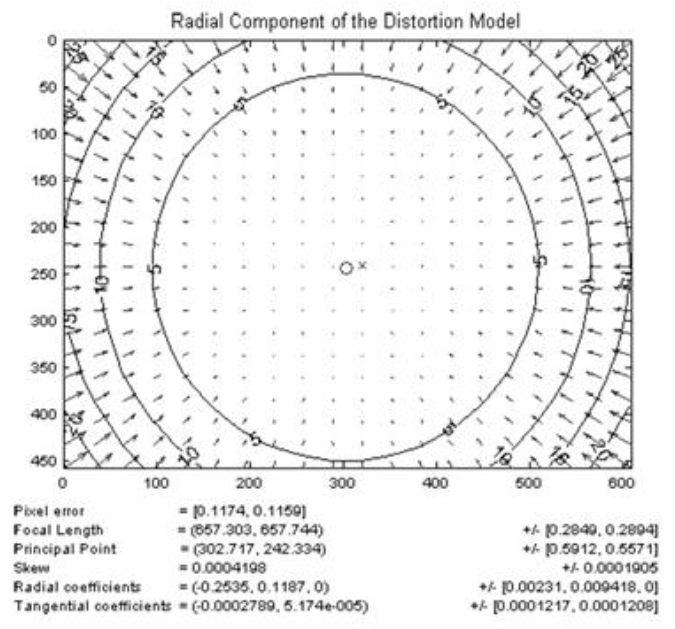
畸变矫正
畸变主要分为了径向畸变和切向畸变:
径向畸变
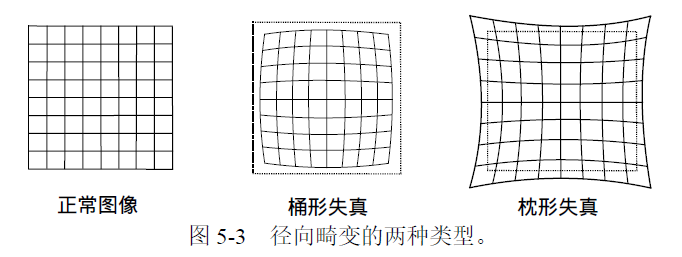
畸变模型使用多项式来描述如下: \[ \begin{aligned} x_{distort}=x_n\cdot(1+k_1r^2+k_2r^4+k_3r^6)\\ y_{distort}=y_n\cdot(1+k_1r^2+k_2r^4+k_3r^6) \end{aligned} \] 其中 \(x_n\) 和 \(y_n\) 为归一化坐标: \[ \begin{cases} x_n = \frac XZ \\ y_n = \frac YZ \end{cases} \] 注意他们并不是归一化平面上的坐标,与其相差了一个因子 \(f\)。 \[ r=\sqrt{x_n^2+y_n^2} \] 一般多项式取到前三项,即三个径向畸变参数 \(k_1\),\(k_2\),\(k_3\)。
对于畸变很小的中心区域, 主要起作用的是 \(k_1\);
对于畸变较大的边缘区域,主要起作用的是 \(k_2\);
对于畸变很大的鱼眼相机,可以加入 \(k_3\) 来表示;
切向畸变
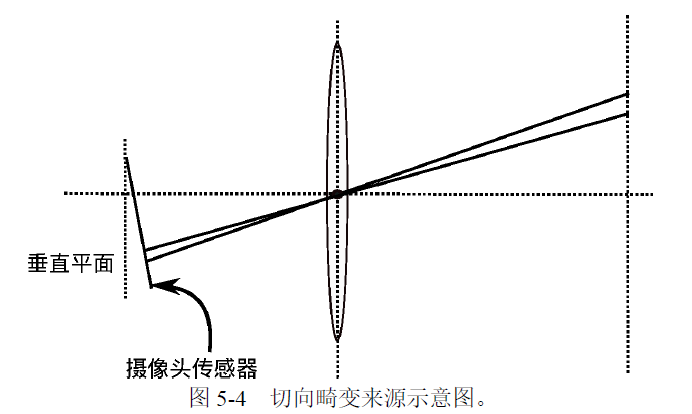
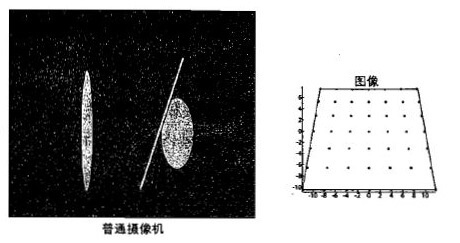
通常是透镜与像平面没有严格平行导致。
畸变模型描述如下: \[
\begin{aligned}
x_{distort}=x_n+2p_1x_ny_n+p_2(r^2+2x^2) \\
y_{distort}=y_n+p_1(r^2+2y^2)+2p_2x_ny_n
\end{aligned}
\] 
畸变矫正
我们合并一下可以得到: \[ \begin{cases} x_{distort}=x_n\cdot(1+k_1r^2+k_2r^4+k_3r^6)+2p_1x_ny_n+p_2(r^2+2x^2)\\ y_{distort}=y_n\cdot(1+k_1r^2+k_2r^4+k_3r^6)+p_1(r^2+2y^2)+2p_2x_ny_n \end{cases} \] 通常记相机畸变参数为: \[ disCoffes = [k_1,k_2,p_1,p_2,k_3] \]
去畸变程序
1 |
|
鱼眼相机
鱼眼相机标定不能使用针孔模型,而是使用鱼眼相机模型,见论文:Kannala J, Brandt S S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28 (8): 1335–1340.
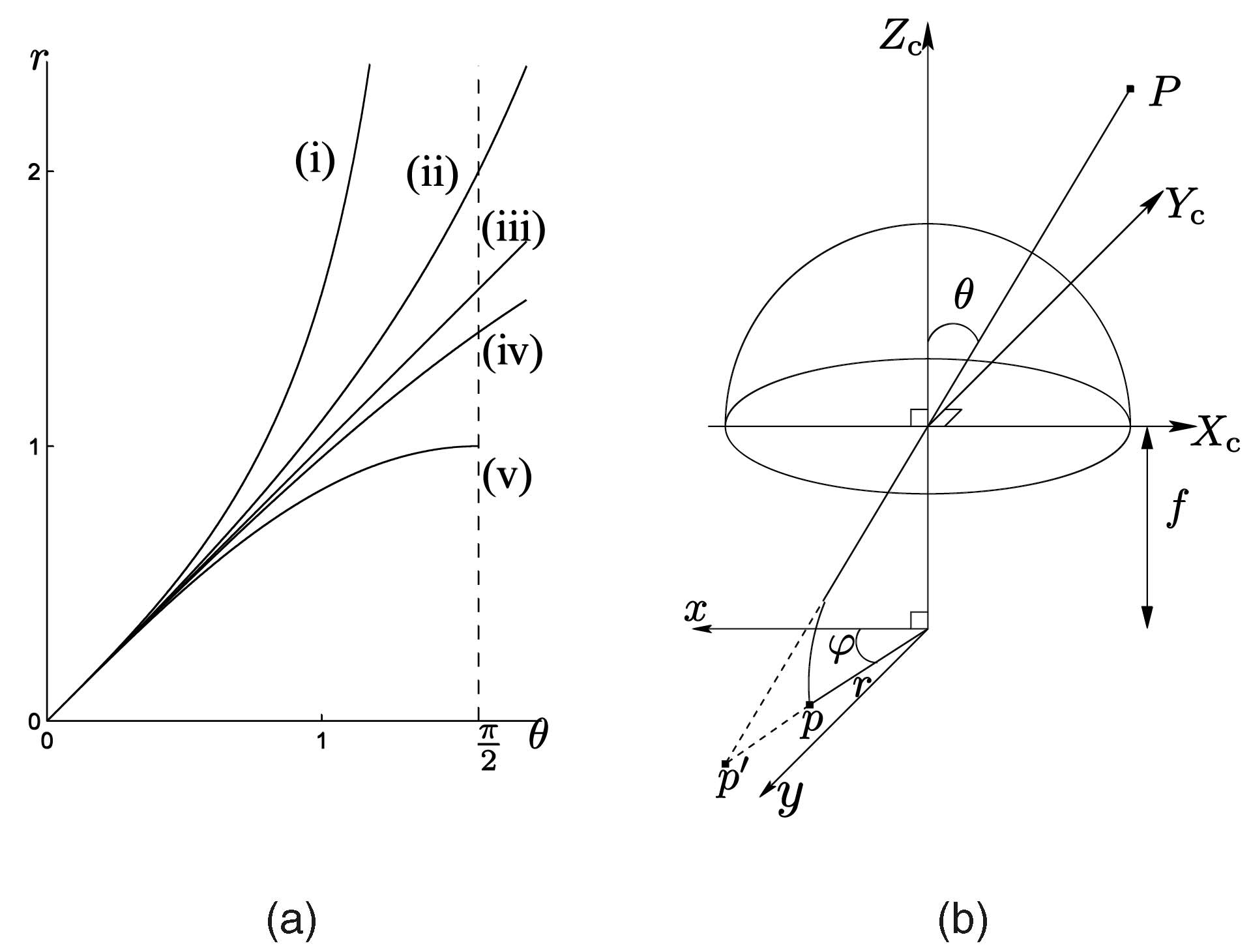
针孔相机可以描述成下述公示: \[ r=f\tan\theta \]
\[ \begin {aligned} \text {外参:} TX_w=\begin {bmatrix} X\\Y\\Z\end {bmatrix} \\ x_n=\frac XZ,\;y_n = \frac YZ \\ r^2 = x^2_n + y^2_n\\ \theta = \arctan (r)\\ \theta_d=k_0\theta+k_1\theta^3+k_2\theta^5+k_3\theta^7+k_4\theta^9\\ x_d = \frac {\theta_d}{r} x_n,\;y_d = \frac {\theta_d}{r} y_n,\\ u = f_xx_d+c_x, v = f_yy_d+c_y \end {aligned} \]
张氏标定法
\[ s\begin{bmatrix}u\\v\\1\end{bmatrix} = A\begin{bmatrix}r_1&r_2&r_3&t\end{bmatrix} \begin{bmatrix}X\\Y\\0\\1\end{bmatrix}\\ A = \begin{bmatrix}c&cs&xH\\0&c(1+m)&yH\\0&0&1\end{bmatrix} \]
我们把世界坐标系设置在标定板上,所以世界坐标中的 Z=0。由于 Z=0,公示化简如下: \[ s\begin{bmatrix}u\\v\\1\end{bmatrix} = \underbrace{\begin{bmatrix}c&cs&xH\\0&c(1+m)&yH\\0&0&1\end{bmatrix}}_K \underbrace{\begin{bmatrix}r_{11}&r_{12}&t_1\\r_{21}&r_{22}&t_2\\r_{31}&r_{32}&t_3\end{bmatrix}} _{\begin{bmatrix}r_1&r_2&t\end{bmatrix}} \begin{bmatrix}X\\Y\\1\end{bmatrix} \]
计算 H
单应矩阵 H: \[ H=\lambda\begin{bmatrix}c&cs&xH\\0&c(1+m)&yH\\0&0&1\end{bmatrix} \begin{bmatrix}r_{11}&r_{12}&t_1\\r_{21}&r_{22}&t_2\\r_{31}&r_{32}&t_3\end{bmatrix} \\ \] 其中 \(\lambda\) 可以是任意的尺度因子
在一张 checkerboard 图像上有 \(I\) 个特征点,我们能生成 \(I\) 条公式: \[ \begin{bmatrix}x_i\\y_i\\1\end{bmatrix}=H\begin{bmatrix}X_i\\Y_i\\1\end{bmatrix} \] 由于 H 有 8DoF(少了一个尺度因子),每一个特征点提供 x 和 y 两个约束,所以一张图至少要有 4 个特征点算 H。
由 H 计算 K
\[ H = \begin{bmatrix}h_1&h_2&h_3\end{bmatrix}=A\begin{bmatrix}r_1&r_2&t\end{bmatrix} \]
由于 Q\(r_1\) 和 \(r_2\) 正交: \[ \begin{cases} r_1^Tr_2=0\\ r_1^Tr_1 = r_2^Tr_2=1 \end{cases}\\ \] 易得两个约束: \[ \begin{cases} r_1 = A^{-1}h_1\\ r_1 = A^{-1}h_1 \end{cases} \;\Rightarrow\; \begin{cases} h_1^TA^{-T}A^{-1}h_2=0\\ h_1^TA^{-T}A^{-1}h_1=h_2^TA^{-T}A^{-1}h_2 \end{cases} \\ \] B 是对称阵,可以表示成 6D 向量 b \[ B=A^{-T}A^{-1}=\begin{bmatrix}B_{11}&B_{12}&B_{13}\\B_{21}&B_{22}&B_{23}\\B_{31}&B_{32}&B_{33}\end{bmatrix}\\ b=\begin{bmatrix}B_{11}&B_{12}&B_{22}&B_{13}&B_{23}&B_{33}^T\\\end{bmatrix} \] 令: \[ h^T_iBh_j=v^T_{i,j}b \\ \text{with}\\v=\begin{bmatrix} h_{i1}h_{j1}&h_{i1}h_{j2}+h_{i2}h_{j1}&h_{i2}h_{j2}&h_{i3}h_{j1}+h_{i1}h_{j3}&h_{i3}h_{j2}+h_{i2}h_{j3}&h_{i3}h_{j3} \end{bmatrix}^T \] 其中一个 H 可以生成一条下述公式: \[ \begin{bmatrix}v^T_{12}\\(v_{11}-v_{22)})^T\end{bmatrix}b=0 \] v 与 H 相关,b 与内参 K 相关。
有 n 张图我们可以得到如下矩阵: \[ \begin{bmatrix}v^T_{012}\\(v_{011}-v_{022)})^T\\...\\ v^T_{n12}\\(v_{n11}-v_{n22)})^T\end{bmatrix}b=Vb=0 \] 强制添加约束 b=1,最小化下述误差: \[ b^*=arg\,\underset b{min}\,||b|| \quad\text{with}\:||b||=1 \] 因为 B 有 5 或 6 个 DoF,我们需要至少 3 个平面。
非线性参数
非线性参数在这里即畸变向量,为图像坐标加上偏移量(畸变模型): \[ \begin{aligned} \triangle x(x,k,q), \\ \triangle y(y,k,q) \end{aligned} \] 其中 k,q 分别是径向畸变和切向畸变的参数。
代畸变的内参 \(K_a\) 可以表示为: \[ K_a=\begin{bmatrix}1&0&\triangle x(x,k,q)\\ 0&1&\triangle y(y,k,q)\\ 0&0&0\\ \end{bmatrix}K \] 优化以下函数: \[ \underset{(K,k,q,R_t,t_n)}{min}\;\sum_n\sum_i||x_{ni}-\hat{x}(K,k,q,R_t,t_n,X_{ni})||^2 \] \(K\):内参
\(k\):径向畸变
\(q\):切向畸变
\(R_t\):旋转矩阵
\(t_n\):平移向量
\(X_{ni}\):世界坐标
工具
- OpenCV
- CamOdoCal
- Kalibr
- Matlab